Sensor jarak SRF04 adalah sebuah device transmitter dan receiver ultrasonic dalam 1 package buatan Devantech yang dapat membaca jarak dengan prinsip sonar.
Spesifikasi SRF04:
Tegangan keja : 5V DC
Konsumsi arus : 30mA (max 50mA)
Frekuensi kerja : 40KHz
Jangkauan : 3cm - 300cm
Input trigger : 10us, level pulsa TTL
Dimensi : PxLxT (24 x 20 x 17) mm
SRF04 mempunyai 4 pin yaitu VCC, Trigger, Output dan Gnd.
Prinsip kerja SRF04 adalah transmitter memancarkan seberkas sinyal ultrasonic (40KHz) yang bebentuk pulsatic, kemudian jika di depan SRF04 ada objek padat maka receiver akan menerima pantulan sinyal ultrasonic tersebut. Receiver akan membaca lebar pulsa (dalam bentuk PWM) yang dipantulkan objek dan selisih waktu pemancaran. Dengan pengukuran tersebut, jarak objek di depan sensor dapat diketahui. Untuk lebih jelasnya, perhatikan gambar di bawah ini :
Untuk mengaktifkan SRF04, mikrokontroler harus mengirimkan pulsa positif minimal 10us melalui pin trigger, maka SRF04 akan mengeluarkan sinyal ultrasonic sebesar 8 cycle dan selanjutnya SRF04 akan memberikan pulsa 100us-18ms pada outputnya tergantung pada informasi jarak pantulan objek yang diterima. Berikut ini adalah data perbandingan antara sudut pantulan dan jarak:
Selain SRF04, Devantech juga mengeluarkan SRF02 dan SRF05 yang pada prinsip kerjanya sama tetapi memiliki struktur komunikasi data dan spesifikasi yang berbeda.
Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah dari suatu object. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar.
Gambar sensor PIR
Sensor ini biasanya digunakan dalam perancangan detektor gerakan berbasis PIR. Karena semua benda memancarkan energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra merah dengan suhu tertentu (misal: manusia) melewati sumber infra merah yang lain dengan suhu yang berbeda (misal: dinding), maka sensor akan membandingkan pancaran infra merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan pembacaan pada sensor.
Sensor PIR terdiri dari beberapa bagian yaitu :
- Lensa Fresnel
- Penyaring Infra Merah (Sensor)
- Sensor Pyroelektrik (Sensor)
- Penguat Amplifier
- Komparator
Cara kerja pembacaan sensor PIR
Pancaran infra merah masuk melalui lensa Fresnel dan mengenai sensor pyroelektrik, karena sinar infra merah mengandung energi panas maka sensor pyroelektrik akan menghasilkan arus listrik. Sensor pyroelektrik terbuat dari bahan galium nitrida (GaN), cesium nitrat (CsNo3) dan litium tantalate (LiTaO3). Arus listrik inilah yang akan menimbulkan tegangan dan dibaca secara analog oleh sensor. Kemudian sinyal ini akan dikuatkan oleh penguat dan dibandingkan oleh komparator dengan tegangan referensi tertentu (keluaran berupa sinyal 1-bit). Jadi sensor PIR hanya akan mengeluarkan logika 0 dan 1, 0 saat sensor tidak mendeteksi adanya perubahan pancaran infra merah dan 1 saat sensor mendeteksi infra merah. Sensor PIR didesain dan dirancang hanya mendeteksi pancaran infra merah dengan panjang gelombang 8-14 mikrometer. Diluar panjang gelombang tersebut sensor tidak akan mendeteksinya. Untuk manusia sendiri memiliki suhu badan yang dapat menghasilkan pancaran infra merah dengan panjang gelombang antara 9-10 mikrometer (nilai standar 9,4 mikrometer), panjang gelombang tersebut dapat terdeteksi oleh sensor PIR. (Secara umum sensor PIR memang dirancang untuk mendeteksi infra merah tubuh manusia). Sensor ini hanya akan mendeteksi jika object bergerak atau secara teknis saat perubahan pancaran infra merah (falling up atau falling down)
Jarak pancar sensor PIR
Sensor PIR memiliki jangkauan jarak dan sudut pembacaan yang bervariasi, tergantung karakteristik sensor. Proses penginderaan sensor PIR dapat digambarkan sebagai berikut:
Pada umumnya sensor PIR memiliki jangkauan pembacaan efektif hingga 5 meter, dan sensor ini sangat efektif digunakan sebagai human detector.
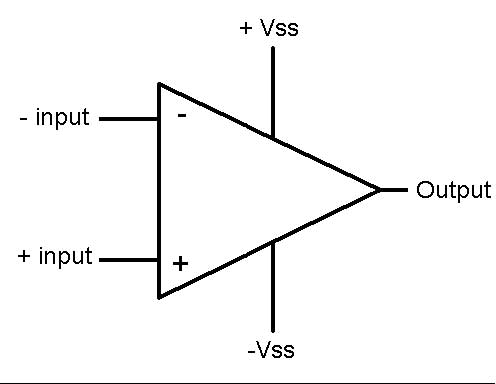
Operational Amplifier merupakan amplifier multiusage dangan dua masukan (inverting dan noninverting) dan satu keluaran. Sifat dasar suatu penguat op-amp adalah:
a. Tegangan pada kedua masukan (inverting dan non inverting) sama
b. Tidak ada arus yang masuk melewati kedua masukan (Iinv = Inoninv =0)
Sebagai amplifier ideal op-amp mempunyai karakteristik sbb:
Ditentukan oleh umpan balik dan mempunyai sifat :
1. Penguatan tegangan besar (Av)
2. Penguatan arus besar (Ai)
3. Penguatan daya besar (Ap)
4. Impendansi input besar (Zin)
5. Impendansi output kecil (Zout)
6. Band Width besar (BW)
Gambar Op-Amp
Gambar konfigurasi internal Op-Amp
Pada aplikasinya, op-amp dapat digunakan sebagai penguat, pembanding maupun switcing. Masing-masing aplikasi adalah dengan memanfaatkan sifat-sifat op-amp di atas, dengan memperhatikan jenis IC yang digunakan (sesuai dengan datasheet).
Aplikasi op-amp:
1. Penguat
- Inverting Amplifier (penguat membalik)
Vout = - (Rf / Rin) x Vin
Gambar penguat inverting
- Non Inverting Amplifier (penguat tak membalik)
Vout = (1 + R2 / R1) x Vin
Gambar penguat non inverting
Selain penguat di atas masih banyak lagi aplikasi dengan op-amp seperti rangkaian penjumlah/pengurang, integrator, differrensiator, komparator (pembanding), filter aktif dan lain sebagainya.
Berikut ini merupakan simulasi modul PLL (Phase Locked Loop) yang dapat digunakan sebagai pembagi frekuensi maupun pengali frekuensi, juga dapat digunakan untuk menganalisa VCO (Voltage Controlled Oscillator). Pada rangkaian berikut digunakan beberapa rangkaian pelengkap sebagai sarana untuk berjalannya simulasi, dikarenakan tapa rangkaian pelengkap tersebut simulasi tidak akan bisa berjalan. Pada hasil simulasi, terdapat perbedaan hasil, namun hal itu dapat dijelaskan dengan penggunaan rangkaian sequential. Untuk lebih lanjut, hubungi saya. Hehehehehe
Berikut gambar rangkaiannya:
Untuk file dengan isis proteus dapat didownload di sini
Proteus 7.5 dapat didownload di sini
Komunikasi serial RS232 diperlukan untuk menghubungkan level RS-232 pada komputer dengan level TTL pada device (dalm hal ini mikrokontroller). Pada proses antarmuka antara komputer dan ikrokontroller, diperlukan sebuah konfigurasi. Misalnya seperti gambar berikut ini:
Kemudian dalam program yang digunakan untuk mengirim dan menerima data dapat dilakukan komunikasi dua arah (serial). Untuk lebih lengkapnya klik disini
“PROTOTIPE PEMBERSIH DEBU OTOMATIS PADA RUANG FILTRASI”
Disusun dalam rangka menyelesaikan tugas mata kuliah Mikrokontroler (MFD 3633)
Disusun oleh:
Jawahir A. H. (09/287592/DPA/3258)
Peri Indriyanto (09/287633/DPA/3270)
Inggih Nugroho (09/289616/DPA/3390)
SEKOLAH VOKASI
UNIVERSITAS GADJAH MADA
YOGYAKARTA
2010
BAB I
PENDAHULUAN
Latar Belakang
Untuk memenuhi nilai akhir mata kuliah Mikrokontroler (MFD 3633) di program studi D3 Elektronika dan Instrumentasi UGM, mahasiswa diwajibkan membuat sebuah karya nyata dengan memanfaatkan IC mikrokontroler keluarga MCS51 dari Atmel yaitu AT89C51/52/55/2051 atau AT89S51/52/55/2051 dengan bahasa pemrograman assembly. Karya tersebut kemudian harus dipresentasikan sebelum ujian akhir semester dengan dikumpulkan beserta laporan dan video demo alat.
Dari deskripsi di atas, dibuat prototype yang memiliki fungsi sebagai pembersih debu otomatis pada ruang filtrasi. Rangkaian menggunakan mikrokontroller AT89S52 dan dengan sensor obyek yang menggunakan photodiode dan LED super bright sebagai sensor.
Pembersih debu otomatis pada ruang filtrasi ini pada umumnya digunakan oleh perusahaan/industri yang proses produksinya harus steril dari debu dan kotoran, seperti industri semiconductor dan pembuatan IC atau industri obat-obatan.
Tujuan
Tujuan dari pembuatan prototype pembersih debu otomatis pada ruang filtrasi adalah:
1.Menerapkan mata kuliah Mikrokontroler yang mempelajari bahasa pemrograman assembly dan aplikasi IC AT89C51/52/55 untuk membuat sebuah karya nyata yang bermanfaat bagi kehidupan.
2.Merancang sistem kerja alat untuk aplikasi pembersih debu otomatis pada ruang filtrasi dengan sebuah prototype.
Manfaat
1.Bagi Mahasiswa
Dengan mempraktekkan pembuatan karya nyata, mahasiswa dapat menambah ilmu pengetahuan dan pengalaman, serta dapat memenuhi tugas untuk penilaian mata kuliah Mikrokontroler (MFD 3633) di program studi D3 Elektronika dan Instrumentasi UGM.
2.Bagi Masyarakat Luas
Masyarakat dapat menjadikan karya ini untuk mengembangkan sistem lain yang dapat dimanfaatkan untuk membantu kebutuhan manusia.
3.Bagi Industri
Karya ini dapat digunakan dan dipasang dengan maksud akan mensterilkan pekerja dari debu dan kotoran pada pakaian secara otomatis sehingga proses produksi dapat bersih dari debu dan kotoran.
BAB II
RANGKAIAN DAN ANALISA
Gambaran Umum Sistem
Ruang filtrasi adalah ruangan sterilisasi dengan cara meniupkan udara (biasanya dengan tekanan tinggi) ke obyek/orang yang berada di dalamnya untuk membersihkan debu yang menempel pada orang/obyek tersebut. Udara ditiupkan melalui beberapa sisi ruangan dan sisi yang lainnya menghisap udara yang tercampur dengan debu. Dengan demikian, orang yang keluar dari ruang filtrasi bebas dari debu yang menempel pada baju dan assesoris lainnya.
Rangkaian terdiri dari bagian sensor, yaitu sensor pintu masuk, sensor pintu keluar dan sensor pendeteksi obyek. Prototype disusun seperti sebuah ruangan dengan pintu masuk dan pintu keluar yang masing-masing sisi ruangan dipasang kipas peniup dan penghisap debu.
Jika ada orang/obyek yang masuk ke ruangan, rangkaian akan mengecek apakah pintu masuk dan pintu keluar sudah tertutup dengan sensor (switch) di pintu. Kemudian rangkaian juga akan mengecek apakah sensor obyek mendeteksi, kalau semua terpenuhi maka proses filtrasi akan berjalan dengan rangkaian yang mengaktifkan driver kipas.
Blok Diagram
SENSOR
ADC
MIKROKONTROLER
KIPAS
DRIVER
POWER SUPPLY
Gambar 2.1. Blok Diagram Prototype Pembersih Debu Otomatis
Pada sensor obyek digunakan LED super bright dan Photodiode. Photodiode adalah komponen peka cahaya yang mempunyai karakteristik mengubah nilai resistansi Anode terhadap Cathode. Nilai resistansi ini tergantung cahaya yang mengenai tubuh photodiode, dalam kondisi gelap nilai resistansi photodiode berkisar antara 70 KΩ hingga 100 KΩ dan ketika terkena cahaya (dari LED) hanya berkisar 20 KΩ hingga 25 KΩ. Dengan karakteristik photodiode inilah dapat disusun rangkaian pembagi tegangan yang nilai outputnya tergantung pada intensitas cahaya.
Pada gambar di atas, saat cahaya LED mengenai PD (Photodiode) maka resistansi photodiode akan menurun. Dengan turunnya nilai resistansi photodiode maka Vout akan kecil, sedangkan saat cahaya LED terhalang obyek, maka photodiode tidak terkena cahaya dan nilai resistansinya tinggi, sehingga Vout akan tinggi pada kondisi ini. Adapun untuk menghitung Vout adalah dengan rumus:
-ADC (Analog to Digital Converter)
Pada rangkaian ADC, digunakan OP-AMP dengan IC LM741 sebagai comparator, dimana tegangan comparator diatur oleh VR (Variable Resistor) yang dipasang pada non inverting input dan inverting input dihubungkan dengan keluaran pada sensor.
Tegangan comparation diatur pada tegangan tengah antara Vin minimum dan Vin maksimum, biasanya jika tegangan catu 5V dan rangkaian sensor sama seperti di atas maka tegangan comparator antara 2,5V hingga 3V. Jika Vin lebih tinggi dari V comparation maka Vout akan rendah sedangkan jika Vin lebih rendah dari V comparation, maka Vout akan tinggi karena yang digunakan adalah rangkaian pembalik (inverting).
-Mikrokontroler AT89S52
Mikrokontroler AT89S52 berfungsi sebagai pengatur utama sistem, yaitu membaca input pada port yang digunakan sebagai input dan memberikan logika output pada port yang digunakan sebagai output sesuai dengan program yang dituliskan didalamnya. Program yang digunakan adalah dengan bahasa assembly, output hanya akan bekerja sesuai program jika semua kondisi memenuhi baik itu input maupun catu daya rangkaian.
-Driver
Rangkaian driver sebenarnya adalah rangkaian switching (saklar) dengan menggunakan transistor NPN yaitu D313.
Input dari driver dihubungkan dengan Port 2 pada AT89S52, kemudian output diambil dari pin Emitter. Ouput inilah yang dihubungkan dengan Fan (kipas) pada setiap sisi prototype ruangan.
Karena yang digunakan adalah transistor D313 yang merupakan transistor silicon, maka driver akan aktif (collector-emitter terhubung) atau kipas menyala jika tegangan input dari P2 lebih besar dari 0,7V, sedangkan jika tegangan P2 lebih tinggi dari 0,7V maka driver tidak aktif (open circuit) dan kipas akan padam.
2.Cara Kerja Umum Sistem
Pada prototype pembersih debu otomatis dalam ruang filtrasi ini, digunakan sensor pendeteksi obyek/orang yaitu menggunakan photodiode dan LED super bright yang dirangkai berdasarkan prinsip kerja sonar. Cahaya yang dikeluarkan oleh LED dipancarkan secara langsung ke arah photodiode sehingga sensor menunjukkan bahwa tidak ada obyek. Jika ada obyek padat di dalam ruangan maka cahaya dari LED tersebut akan dihalangi sehingga photodiode tidak mendapatkan cahaya. Dengan kondisi ini nilai hambatan photodiode akan naik dan dengan prinsip pembagi tegangan maka didapatkan perubahan tegangan tergantung ada tidaknya cahaya yang mengenai photodiode. Dari perubahan kondisi photodiode ini akan digunakan untuk mengindikasikan mikrokontroller ada atau tidaknya obyek/orang di dalam ruangan filtrasi. Sebelum masuk ke mikrokontroller, sinyal dari photodiode yang berupa sinyal analog ini harus diubah terlebih dahulu menjadi sinyal digital menggunakan rangkaian ADC (Analog to Digital Converter) yang disusun dari IC LM741 (OP-AMP).
Ruangan terdiri dari enam sisi tertutup yang masing-masing sisi mempunyai kipas yang berfungsi meniup dan menghisap debu. Sisi atas, depan, belakang, kanan dan kiri terdapat kipas yang berfugsi meniupkan udara agar debu terlepas dari obyek/orang. Sisi bawah terpasang kipas yang berfungsi menghisap debu yang dilepaskan oleh kipas pada sisi yang lain. Sensor obyek dipasang pada dinding ruangan bagian pintu depan dan pintu belakang. Pada pintu depan dan pintu belakang juga dipasang switch sebagai sensor indikasi ruangan tertutup. Jika sensor di kedua pintu mengindikasikan bahwa ruangan tertutup, maka sensor obyek akan membaca apakah ada obyek/orang di dalam ruangan. Jika terdeteksi obyek/orang, mikrokontroller akan mengaktifkan driver kipas secara berkala selama satu menit yaitu pada 5 detik pertama yang menyala adalah kipas atas dan bawah, kemudian 5 detik berikutnya kipas depan dan bawah, kemudian 5 detik berikutnya kipas belakang dan bawah, kemudian 5 detik berikutnya kipas kanan dan bawah, kemudian 5 detik berikutnya kipas kiri dan bawah, dan 35 detik berikutnya kipas menyala semuanya. Setelah itu rangkaian akan memberikan sinyal dengan menyalakan LED bahwa proses telah selesai.
Karena jumlah kipas peniup dan penghisap tidak sama yaitu 5:1, maka kecepatan kipas penghisap (kipas bawah) harus lebih tinggi daripada kipas lainnya, minimal kecepatannya lima kali lebih tinggi agar pada saat semua kipas menyala maka jumlah udara yang masuk dan udara yang keluar sama. Atau kondisi ini dapat diganti kipas penghisap lebih besar dari kipas lainnya pada kecepatan sama.
Setelah system filtrasi bekerja selama 1 menit, maka sistem akan berhenti dan obyek/orang dapat keluar melalui pintu belakang dengan kondisi bersih dari debu.
BAB III
PEBAHASAN
A.Proses Pembuatan
Proses pembuatan alat prototype pembersih debu otomatis ini terdiri dari beberapa tahap, yaitu:
1.Desain Rangkaian
Rangkaian didesain menurut blok diagram yang sudah dibuat yaitu terdiri dari sensor, ADC, mikrokontroler dan driver. Kemudian dibuat skema rangkaian dengan menggunakan Eagle.
2.Desain PCB
Dari skema rangkaian yang telah dibuat, kemudian dibuat desain PCB (Printed Circuit Board) dengan menggunakan PCB Designer.
3.Pembuatan PCB
Setelah dibuat desain PCB, maka layout PCB dicetak/diprint pada sebuah kertas dan difotocopy dengan kertas glossy. Kemudian disiapkan PCB polos seukuran desain. Hasil fotocopy dipotong agar sesuai dengan PCB polosnya. Kemudian dengan meletakkan permukaan yang terdapat gambar di atas lapisan tembaga PCB polos, kemudian disetrika hingga semua gambar layout menempel pada PCB. Setelah itu kertas glossy dilepas dan dibersihkan dengan air hingga hanya ada jalur saja di atas lapisan tembaga pada PCB. Kemudian PCB dilarutkan dalam cairan FeCl3 hingga semua tembaga yang tidak tertutup jalur hilang. Kemudian jalur tinta dibersihkan dengan bensin/minyak M3 dan digosok dengan serat baja hingga bersih. Untuk menjaga agar lapisan tidak korosi/berkarat, lapisi PCB dengan cairan lofesol (gondorukem). Setelah kering, dilakukan pengeboran dengan bor PCB pada terminal-terminal komponen.
4.Pemasangan Komponen
Semua komponen dipasang di PCB dan dilakukan penyolderan sehingga hanya tinggal merangkai kit menjadi prototype bersama mekaniknya.
5.Perakitan (Assembling)
Setelah kit PCB selesai dibuat, pasang kit pada mekanik prototype dan hubungkan jalur input output serta supply dengan kabel. Kemudian pasang semua bahan pada prototype.
6.Trouble Shooting
Trouble shooting diperlukan jika setelah proses pembuatan selesai rangkaian tidak bekerja dengan benar, maka perlu dicari kesalahan dan kemudian dibenarkan.
BAB IV
PENUTUP
Kesimpulan
Kesimpulan yang didapat dari pembuatan prototype pembersih debu otomatis adalah:
i.Dengan IC mikrokontroler AT89S52 dapat dibuat rangkaian pengontrol yang digunakan untuk filtrasi/pembersih debu secara otomatis dengan sensor obyek dari LED super bright dan photodiode.
ii.Dengan memanfaatkan photodiode dan LED super bright yang dirangkai sedemikian rupa dapat digunakan sebagai sensor pendeteksi obyek (padat).
Saran
1. Sistem ini masih dapat dikembangkan lebih lanjut lagi untuk hardware dan softawarenya tergantung dalam hal aplikasinya, misalnya untuk sistem monitoring obyek atau yang lainnya.